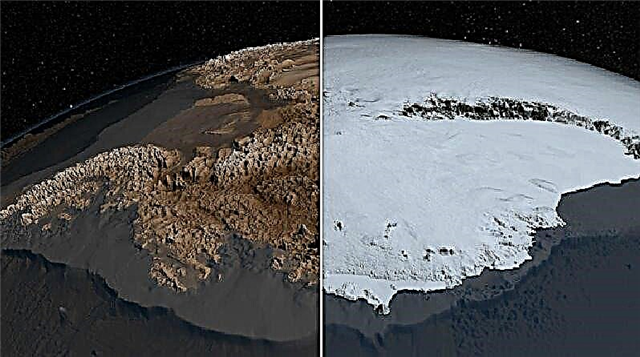
Membangun kendaraan terbang untuk Mars akan memiliki keuntungan signifikan untuk eksplorasi permukaan. Ini hanya 1,6% dari kepadatan udara bumi di permukaan laut, memberi atau menerima. Ini berarti pesawat konvensional harus terbang sangat cepat di Mars agar tetap tinggi. Rata-rata Cessna Anda akan bermasalah.
Tetapi alam dapat memberikan cara alternatif untuk melihat masalah ini.
Rezim fluida hewan terbang, (atau berenang), mesin, dll. Dapat diringkas dengan sesuatu yang disebut Reynolds Number (Re). Re sama dengan panjang karakteristik x kecepatan x densitas fluida, dibagi dengan viskositas dinamis. Ini adalah ukuran rasio kekuatan inersia terhadap yang kental. Rata-rata pesawat Anda terbang dengan Re: banyak kelembaman relatif terhadap kekakuan udara. Karena kepadatan udara Mars rendah, satu-satunya cara untuk mendapatkan kelembaman itu adalah dengan sangat cepat. Namun, tidak semua selebaran beroperasi di Re tinggi: sebagian besar hewan terbang terbang di Re jauh lebih rendah. Serangga, khususnya, beroperasi pada bilangan Reynolds yang cukup kecil (relatif berbicara). Bahkan, beberapa serangga sangat kecil sehingga mereka berenang di udara, bukannya terbang. Jadi, jika kita skala makhluk seperti serangga atau burung kecil sedikit, kita mungkin mendapatkan sesuatu yang bisa bergerak di atmosfer Mars tanpa harus pergi terlalu cepat.
Kita membutuhkan sistem persamaan untuk membatasi bot kecil kita. Ternyata itu tidak terlalu sulit. Sebagai perkiraan kasar, kita dapat menggunakan persamaan frekuensi mengepak rata-rata Colin Pennycuick. Berdasarkan ekspektasi frekuensi mengepak dari Pennycuick (2008), frekuensi mengepak bervariasi kira-kira seperti massa tubuh ke daya 3/8, percepatan gravitasi ke daya 1/2, rentang ke daya -23/24, area sayap ke -1 / 3 daya, dan densitas fluida hingga daya -3/8. Itu berguna, karena kita dapat menyesuaikan agar sesuai dengan gravitasi Mars dan kepadatan udara. Tetapi kita perlu tahu apakah kita menumpahkan vortisitas dari sayap dengan cara yang masuk akal. Untungnya, ada hubungan yang diketahui, di sana, juga: nomor Strouhal. Str (dalam hal ini) adalah mengepakkan amplitudo x mengepakkan frekuensi dibagi dengan kecepatan. Dalam penerbangan jelajah, ternyata cukup dibatasi.
Bot kami harus, oleh karena itu, berakhir dengan Str antara 0,2 dan 0,4, sambil mencocokkan persamaan Pennycuick. Dan kemudian, akhirnya, kita perlu mendapatkan nomor Reynolds dalam kisaran untuk serangga terbang besar (serangga kecil terbang dalam rezim aneh di mana banyak propulsi berbasis drag, jadi kita akan mengabaikan mereka untuk saat ini). Hawkmoth dipelajari dengan baik, jadi kami memiliki rentang Re untuk berbagai kecepatan. Tergantung pada kecepatan, itu berkisar dari sekitar 3.500 hingga sekitar 15.000. Jadi di suatu tempat di stadion baseball itu akan dilakukan.
Ada beberapa cara untuk menyelesaikan sistem. Cara yang elegan adalah menghasilkan kurva dan mencari titik persimpangan, tetapi metode yang cepat dan mudah adalah memasukkannya ke dalam program matriks dan menyelesaikannya secara berulang. Saya tidak akan memberikan semua opsi yang mungkin, tapi di sini ada yang bekerja dengan cukup baik untuk memberikan ide:
Massa: 500 gram
Rentang: 1 meter
Rasio Aspek Sayap: 8.0
Ini memberikan Str 0,31 (tepat pada uang) dan Re 13,900 (layak) pada koefisien lift 0,5 (yang masuk akal untuk jelajah). Untuk memberikan gambaran, bot ini kira-kira memiliki proporsi seperti burung (mirip dengan bebek), meskipun sedikit di sisi terang (tidak tangguh dengan bahan sintetis yang baik). Namun, ia akan mengepak melalui busur yang lebih besar pada frekuensi yang lebih tinggi daripada seekor burung di Bumi, sehingga ia akan terlihat seperti ngengat raksasa yang jauh dari mata kita yang terlatih di Bumi. Sebagai bonus tambahan, karena bot ini terbang dalam Reynolds Rezim moth-ish, masuk akal bahwa ia mungkin dapat melompat ke koefisien lift serangga yang sangat tinggi untuk periode singkat menggunakan dinamika tidak stabil. Pada CL 4.0 (yang telah diukur untuk kelelawar kecil dan penangkap lalat, serta beberapa lebah besar), kecepatan kios hanya 19,24 m / s. Max CL paling berguna untuk pendaratan dan peluncuran. Jadi: bisakah kita meluncurkan bot kita pada 19,24 m / s?
Untuk bersenang-senang, mari kita asumsikan bot burung / bug kami juga diluncurkan seperti binatang. Hewan tidak lepas landas seperti pesawat terbang; mereka menggunakan inisiasi balistik dengan mendorong dari substrat. Sekarang, serangga dan burung menggunakan kaki untuk ini, tetapi kelelawar (dan mungkin pterosaurus) menggunakan sayap untuk menggandakan sebagai sistem pendorong. Jika kita membuat sayap bot kita layak, kita dapat menggunakan motor yang sama untuk meluncurkan untuk terbang, dan ternyata tidak banyak dorongan yang diperlukan. Berkat gravitasi Mars yang rendah, bahkan sedikit lompatan akan berjalan jauh, dan sayapnya sudah bisa mengalahkan dekat 19,24 m / s seperti apa adanya. Jadi hanya sedikit hop akan melakukannya. Jika kita merasa mewah, kita bisa sedikit lebih keras, dan itu akan keluar dari kawah, dll. Either way, bot kita hanya perlu sekitar 4% seefisien sebuah leaper sebagai pelompat biologis yang baik untuk membuat hingga kecepatan.
Angka-angka ini, tentu saja, hanyalah ilustrasi kasar. Ada banyak alasan mengapa program luar angkasa belum meluncurkan robot jenis ini. Masalah dengan penyebaran, catu daya, dan pemeliharaan akan membuat sistem ini sangat menantang untuk digunakan secara efektif, tetapi mungkin sama sekali tidak mustahil. Mungkin suatu hari nanti penemu kami akan menggunakan bot ngengat seukuran bebek untuk pengintaian yang lebih baik di dunia lain.