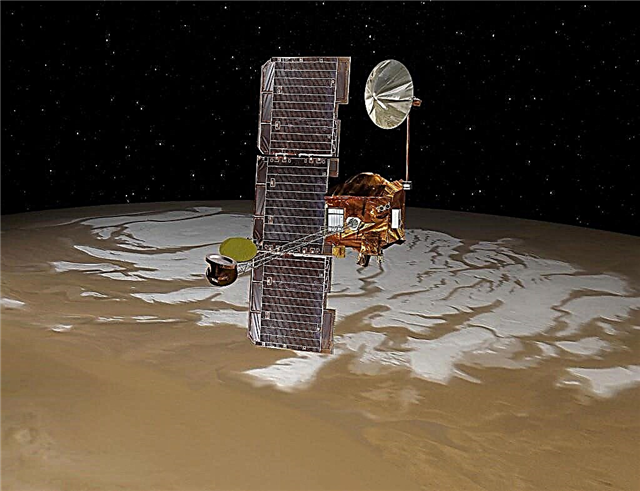
MicroBots planet. Kredit gambar: NASA Klik untuk memperbesar
Wawancara dengan Penny Boston, Bagian I
Jika Anda ingin bepergian ke bintang yang jauh, atau menemukan kehidupan di dunia lain, dibutuhkan sedikit perencanaan. Itulah sebabnya NASA telah mendirikan NIAC, Institut NASA untuk Konsep Lanjutan. Selama beberapa tahun terakhir, NASA telah mendorong para ilmuwan dan insinyur untuk berpikir di luar kotak, untuk menghasilkan ide-ide di sisi fiksi ilmiah ini. Harapan mereka adalah bahwa beberapa dari ide-ide ini akan berjalan dengan baik, dan memberikan agensi dengan teknologi yang dapat digunakan 20, 30, atau 40 tahun ke depan.
NIAC menyediakan pendanaan dengan dasar kompetitif. Hanya segelintir dari puluhan proposal yang diajukan yang didanai. Pendanaan fase I minimal, cukup bagi para peneliti untuk menyempurnakan ide mereka di atas kertas. Jika ide tersebut menunjukkan prestasi, maka ia mungkin mendapatkan pendanaan Tahap II, memungkinkan penelitian untuk melanjutkan dari konsep murni ke tahap prototipe mentah.
Salah satu proyek yang menerima pendanaan Tahap II awal tahun ini adalah kolaborasi antara Dr. Penelope Boston dan Dr. Steven Dubowsky untuk mengembangkan “hopping microbots” yang mampu menjelajahi medan berbahaya, termasuk gua bawah tanah. Jika proyek berjalan dengan baik, melompati microbots suatu hari nanti mungkin dikirim untuk mencari kehidupan di bawah permukaan Mars.
Boston menghabiskan banyak waktu di gua, mempelajari mikroorganisme yang hidup di sana. Dia adalah direktur Program Studi Gua dan Karst dan seorang profesor di New Mexico Tech di Socorro, New Mexico. Dubowsky adalah direktur MIT Field and Space Robotics Laboratory di MIT, di Cambridge, Massachusetts. Ia dikenal sebagian karena penelitiannya pada otot buatan.
Majalah Astrobiology mewawancarai Boston tak lama setelah dia dan Dubowsky menerima hibah NIAC Tahap II mereka. Ini adalah yang pertama dari wawancara dua bagian. Astrobiology Magazine (AM): Anda dan Dr. Steven Dubowsky baru-baru ini menerima dana dari NIAC untuk menggarap gagasan menggunakan robot mini untuk menjelajahi gua-gua bawah permukaan di Mars? Bagaimana proyek ini terjadi?
Penny Boston (PB): Kami telah melakukan cukup banyak pekerjaan di gua-gua di Bumi dengan tujuan untuk melihat penghuni mikroba dari lingkungan unik ini. Kami pikir mereka dapat berfungsi sebagai templat untuk mencari bentuk kehidupan di Mars dan benda luar angkasa lainnya. Saya menerbitkan sebuah makalah pada tahun 1992, dengan Chris McKay dan Michael Ivanov, menyarankan bahwa permukaan Mars akan menjadi tempat perlindungan terakhir kehidupan di planet itu karena menjadi lebih dingin dan lebih kering dari waktu geologis. Itu membuat kami terjun ke dunia bawah permukaan di Bumi. Ketika kami melakukannya, kami menemukan bahwa ada sederetan organisme luar biasa yang tampaknya berasal dari bawah permukaan. Mereka berinteraksi dengan mineralogi dan menghasilkan biosignatures unik. Jadi itu menjadi daerah yang sangat subur bagi kita untuk belajar.
Masuk ke gua-gua yang sulit bahkan di planet ini tidaklah mudah. Menerjemahkannya ke misi robot luar angkasa robot membutuhkan beberapa pemikiran. Kami memiliki data pencitraan yang baik dari Mars yang menunjukkan bukti geomorfologis yang berbeda untuk setidaknya gua tabung lava. Jadi kita tahu bahwa Mars memiliki setidaknya satu jenis gua yang bisa menjadi target ilmiah yang berguna untuk misi masa depan. Sangat masuk akal untuk berpikir bahwa ada juga jenis-jenis gua lainnya dan kami memiliki makalah di media dalam Makalah Masyarakat Geologi Amerika yang akan datang yang mengeksplorasi mekanisme unik pembentukan gua (speleogenetik) di Mars. Poin penting adalah bagaimana berkeliling di medan yang keras dan sulit.
AM: Dapatkah Anda menggambarkan apa yang Anda lakukan pada fase pertama proyek?
PB: Dalam Fase I, kami ingin fokus pada unit robot yang kecil, sangat banyak (karena itu bisa dikeluarkan), sebagian besar otonom, dan yang memiliki mobilitas yang diperlukan untuk masuk ke medan yang berat. Berdasarkan penelitian Dr. Dubowsky yang sedang berlangsung dengan gerakan robotik yang diaktifkan otot-buatan, kami datang dengan gagasan banyak, banyak, bola-bola kecil, tentang ukuran bola tenis, yang pada dasarnya melompat, hampir seperti kacang lompat Meksiko. Mereka menyimpan energi otot, sehingga untuk berbicara, dan kemudian mereka memantapkan diri ke berbagai arah. Begitulah cara mereka bergerak.
kredit: Render oleh R.D.Gus Frederick
Pengaturan Planet Untuk Eksplorasi Permukaan & Bawah Permukaan Planet Skala Besar. Klik gambar untuk tampilan lebih besar.
Kredit Gambar: Render oleh R.D.Gus Frederick
Kami telah menghitung bahwa kami mungkin dapat mengemas sekitar seribu orang ini menjadi massa muatan seukuran salah satu MERs saat ini (Mars Exploration Rovers). Itu akan memberi kita fleksibilitas untuk menderita kehilangan sebagian besar unit dan masih memiliki jaringan yang bisa melakukan pengintaian dan penginderaan, pencitraan, dan mungkin bahkan beberapa fungsi sains lainnya.
AM: Bagaimana semua bidang kecil ini saling berkoordinasi?
PB: Mereka berperilaku seperti gerombolan. Mereka berhubungan satu sama lain menggunakan aturan yang sangat sederhana, tetapi itu menghasilkan banyak fleksibilitas dalam perilaku kolektif mereka yang memungkinkan mereka untuk memenuhi tuntutan medan yang tidak terduga dan berbahaya. Produk pamungkas yang kami impikan adalah armada para lelaki kecil ini dikirim ke beberapa lokasi pendaratan yang menjanjikan, keluar dari pendarat dan kemudian menuju ke beberapa permukaan bawah tanah atau daerah berbahaya lainnya, tempat mereka menempatkan diri sebagai jaringan. Mereka membuat jaringan komunikasi seluler, berdasarkan node-ke-node.
AM: Apakah mereka dapat mengendalikan arah yang mereka lewati?
PB: Kami memiliki aspirasi agar mereka pada akhirnya menjadi sangat mampu. Saat kami pindah ke Fase II, kami bekerja dengan Fritz Printz di Stanford pada sel bahan bakar ultra-miniatur untuk memberi tenaga pada orang-orang kecil ini, yang akan memungkinkan mereka untuk dapat melakukan berbagai hal yang cukup kompleks. Salah satu kemampuan itu adalah memiliki kendali atas arah tujuan mereka. Ada cara-cara tertentu yang dapat dibangun yang memungkinkan mereka untuk secara istimewa pergi ke satu arah atau lainnya. Tidak setepat itu jika mereka adalah penari beroda yang berjalan lurus. Tetapi mereka bisa lebih suka tidak bisa mengarahkan diri mereka sendiri ke arah yang mereka inginkan. Jadi kami membayangkan bahwa mereka akan memiliki setidaknya kendali kasar atas arah. Tetapi banyak dari nilai mereka ada hubungannya dengan gerakan kawanan mereka sebagai awan yang mengembang.
Betapa indahnya penemu MER, untuk jenis ilmu yang saya lakukan, saya perlu sesuatu yang lebih mirip dengan ide robot serangga yang dipelopori oleh Rodney Brooks di MIT. Mampu memanfaatkan model kecerdasan serangga dan adaptasi untuk eksplorasi sudah lama menarik bagi saya. Menambahkan itu ke mobilitas unik yang disediakan oleh ide lompat Dr. Dubowsky, saya pikir, dapat memungkinkan persentase yang masuk akal dari unit-unit kecil ini untuk bertahan dari bahaya medan di bawah permukaan - yang sepertinya merupakan kombinasi ajaib bagi saya.
HB: Jadi dalam Fase I, apakah semua ini benar-benar dibangun?
PB: Tidak. Fase I, dengan NIAC, adalah studi selama enam bulan yang menegangkan otak, mendorong pensil, untuk memperluas lingkup seni teknologi yang relevan. Dalam Fase II, kami akan melakukan sejumlah kecil prototipe dan pengujian lapangan, selama periode dua tahun. Ini jauh lebih sedikit daripada yang dibutuhkan seseorang untuk misi yang sebenarnya. Tapi, tentu saja, itu adalah mandat NIAC, untuk memeriksa teknologi 10 hingga 40 tahun ke depan. Kami pikir ini mungkin dalam kisaran 10 hingga 20 tahun.
AM: Jenis sensor atau peralatan ilmiah apa yang Anda bayangkan bisa pakai untuk benda-benda ini?
PB: Pencitraan jelas sesuatu yang ingin kita lakukan. Saat kamera menjadi sangat kecil dan kuat, sudah ada unit dalam kisaran ukuran yang bisa dipasang pada hal-hal ini. Mungkin beberapa unit dapat dilengkapi dengan kemampuan pembesaran, sehingga orang dapat melihat tekstur bahan yang mereka gunakan. Mengintegrasikan gambar yang diambil oleh kamera kecil pada banyak unit kecil yang berbeda adalah salah satu area untuk pengembangan di masa depan. Itu di luar cakupan proyek ini, tetapi itulah yang kami pikirkan untuk pencitraan. Dan kemudian, tentu saja sensor kimia, mampu mengendus dan merasakan lingkungan kimia, yang sangat kritis. Semuanya, mulai dari hidung laser kecil hingga elektroda selektif ion untuk gas.
Kami membayangkan memiliki semuanya tidak sama, tetapi lebih sebagai sebuah ansambel, dengan cukup berbagai jenis unit dilengkapi dengan berbagai jenis sensor sehingga kemungkinannya akan tetap tinggi, bahkan memberikan kerugian yang cukup tinggi dari jumlah unit, yang kami masih akan memiliki rangkaian sensor yang lengkap. Meskipun masing-masing unit tidak dapat memiliki muatan sensor yang besar di atasnya, Anda dapat memiliki cukup sehingga dapat memberikan tumpang tindih yang signifikan dengan unit lainnya.
AM: Apakah mungkin untuk melakukan pengujian biologis?
PB: Saya kira begitu. Terutama jika Anda membayangkan kerangka waktu yang kami lihat, dengan kemajuan yang mulai daring dengan segala sesuatu mulai dari titik-titik kuantum hingga perangkat lab-on-a-chip. Tentu saja, kesulitannya adalah mendapatkan bahan sampel untuk mereka. Tetapi ketika kita berhadapan dengan unit-unit penghubung-tanah kecil seperti microbots kami yang melompat, Anda mungkin dapat menempatkan mereka secara langsung di atas materi yang ingin mereka uji. Dalam kombinasi dengan mikroskopi dan citra bidang yang lebih luas, saya pikir kemampuannya ada untuk melakukan beberapa pekerjaan biologis yang serius.
AM: Apakah Anda memiliki gagasan tentang apa tonggak pencapaian yang ingin Anda capai selama proyek dua tahun Anda?
PB: Kami mengantisipasi bahwa pada bulan Maret kami mungkin memiliki prototipe kasar yang memiliki mobilitas yang relevan. Tapi itu mungkin terlalu ambisius. Setelah kami memiliki unit ponsel, rencana kami adalah melakukan pengujian lapangan di gua lava-tube nyata yang sedang kami lakukan sains di New Mexico.
Situs lapangan sudah diuji. Sebagai bagian dari Tahap I, kelompok MIT keluar dan saya mengajari mereka sedikit tentang gua dan seperti apa sebenarnya medan itu. Itu adalah pembuka mata yang besar bagi mereka. Adalah satu hal untuk merancang robot untuk aula MIT, tetapi hal lain untuk mendesainnya untuk lingkungan berbatu di dunia nyata. Itu adalah pengalaman yang sangat mendidik bagi kita semua. Saya pikir mereka memiliki ide yang cukup bagus tentang kondisi apa yang harus mereka penuhi dengan desain mereka.
AM: Apa saja persyaratannya?
PB: Medan yang sangat tidak rata, banyak celah yang bisa dihadang sementara oleh orang-orang ini. Jadi kita akan membutuhkan mode operasi yang memungkinkan mereka melepaskan diri, setidaknya dengan peluang keberhasilan yang masuk akal. Tantangan komunikasi line-of-sight di permukaan yang sangat kasar. Mendapatkan lebih dari batu besar. Terjebak di celah-celah kecil. Hal semacam itu.
Lava tidak mulus. Bagian dalam tabung lava secara intrinsik halus setelah terbentuk, tetapi ada banyak bahan yang menyusut dan retak dan jatuh. Jadi ada tumpukan puing untuk berputar-putar, dan banyak perubahan ketinggian. Dan ini adalah hal-hal yang tidak dapat dilakukan oleh robot konvensional.
Sumber Asli: NASA Astrobiology