Sejak pertama kali diumumkan pada tahun 2012, NASA telah menjadi pesaing utama dalam Tantangan Robotika DARPA (DRC). Kompetisi ini - yang melibatkan robot yang menavigasi rintangan dengan menggunakan alat dan kendaraan - pertama kali disusun oleh DARPA untuk melihat bagaimana robot yang mampu menangani penanganan bencana.
Final untuk tantangan ini akan berlangsung pada 5 dan 6 Juni 2015, di Fairplex di Pomona, California. Dan setelah sampai sejauh ini dengan desain RoboSimian mereka, NASA dihadapkan dengan pertanyaan yang sulit. Haruskah robot primata mereka terus mewakili mereka, atau haruskah kehormatan itu pergi ke robot pengganti baru-baru ini diluncurkan?
Seperti kata pepatah "Anda menari dengan orang yang membawa kamu." Singkatnya, NASA telah memutuskan untuk tetap dengan RoboSimian ketika mereka maju ke babak final hambatan dan ujian dalam upaya mereka untuk memenangkan DRC dan hadiah $ 2 juta.
Pembukaan pengganti dilakukan pada 24 Oktober lalu di Jet Propulsion Laboratory NASA di Pasadena, California. Penampilan robot ini di atas panggung, diiringi lagu mereka 2001: A Space Odyssey, diadakan pada hari yang sama ketika Thomas Rosenbaum dilantik sebagai presiden baru Institut Teknologi California.

Untuk menghormati kesempatan itu, Surrogate (alias "Surge") mondar-mandir di panggung untuk menyajikan tablet digital kepada Rosenbaum, yang ia gunakan untuk menekan tombol yang memulai perintah untuk penjelajah Mars NASA, Curiosity. Terlepas dari sifat meriah acara itu, adegan ini cukup tenang dibandingkan dengan apa yang dirancang untuk robot.
“Lonjakan dan pendahulunya, RoboSimian, dirancang untuk memperluas jangkauan umat manusia, pergi ke tempat-tempat berbahaya seperti pembangkit listrik tenaga nuklir selama skenario bencana seperti yang kita lihat di Fukushima. Mereka dapat mengambil tindakan sederhana seperti membalik katup atau membalik sakelar untuk menstabilkan situasi atau mengurangi kerusakan lebih lanjut, ”kata Brett Kennedy, penyelidik utama robot di JPL.
RoboSimian awalnya diciptakan untuk Tantangan Robotika DARPA, dan selama putaran percobaan Desember lalu, robot tim JPL memenangkan tempat untuk berkompetisi di putaran final, yang akan diadakan di Pomona, California, pada Juni 2015.
Dengan dukungan dari Badan Pengurangan Ancaman Pertahanan dan Aliansi Teknologi Kolaboratif Robotika, robot pengganti memulai konstruksi pada tahun 2014. Desainernya mulai dengan menggabungkan beberapa anggota badan RoboSimian tambahan, dan kemudian menambahkan pangkalan beroda, tulang punggung berbelok, batang tubuh atas, dan kepala untuk memegang sensor.

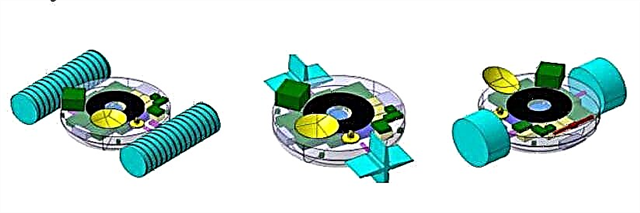
Komponen tambahan termasuk pelengkap mirip topi di atas, yang sebenarnya merupakan perangkat LiDAR (Deteksi Cahaya dan Mulai). Perangkat ini berputar dan menembakkan sinar laser dalam bidang 360 derajat untuk memetakan lingkungan sekitar dalam 3-D.
Memilih di antara mereka adalah panggilan yang sulit, dan mengambil bagian yang lebih baik dari enam bulan terakhir. Di satu sisi, Surrogate dirancang untuk menjadi lebih seperti manusia. Tulang belakangnya tegak, dua lengan dan satu kepala, tingginya sekitar 1,4 meter (4,5 kaki) dan beratnya sekitar 91 kilogram (200 pon). Kekuatan utamanya adalah bagaimana menangani objek, dan tulang belakangnya yang fleksibel memungkinkan kemampuan manipulasi ekstra. Tetapi robot bergerak di jalur, yang tidak memungkinkannya bergerak di atas benda-benda tinggi, seperti tangga, tangga, batu, dan puing.
RoboSimian, sebaliknya, lebih mirip kera, bergerak dengan empat kaki. Ini lebih cocok untuk bepergian di medan yang rumit dan merupakan pendaki mahir. Selain itu, Surrogate hanya memiliki satu set "mata" - dua kamera yang memungkinkan penglihatan stereo - dipasang di kepalanya, sedangkan RoboSimian memiliki hingga tujuh set mata yang dipasang di seluruh tubuhnya.
Robot juga berjalan pada kode komputer yang hampir identik, dan perangkat lunak yang merencanakan gerakan mereka sangat mirip. Seperti dalam gim video, setiap robot memiliki "inventaris" objek yang dapat berinteraksi dengannya. Insinyur harus memprogram robot untuk mengenali benda-benda ini dan melakukan tindakan yang telah ditentukan sebelumnya, seperti memutar katup atau memanjat balok.

Pada akhirnya, mereka mengambil keputusan. RoboSimian akan mewakili tim di Pomona.
"Ini berujung pada kenyataan bahwa Surrogate adalah platform manipulasi yang lebih baik dan lebih cepat pada permukaan yang jinak, tetapi RoboSimian adalah solusi menyeluruh, dan kami berharap bahwa solusi menyeluruh akan lebih kompetitif dalam hal ini," Kennedy kata.
Tim RoboSimian di JPL bekerja sama dengan mitra di University of California, Santa Barbara, dan Caltech untuk membuat robot berjalan lebih cepat. Peneliti JPL juga berencana untuk menempatkan LiDAR di atas RoboSimian di masa depan. Upaya ini berupaya untuk meningkatkan robot dalam jangka panjang, tetapi juga bertujuan membuatnya siap untuk menghadapi tantangan Final Tantangan Robot DARPA.
Secara khusus, itu akan dihadapkan dengan tugas-tugas seperti mengemudi kendaraan dan keluar dari itu, menegosiasikan puing-puing yang menghalangi pintu, memotong lubang di dinding, membuka katup, dan melintasi lapangan dengan cinderblocks atau puing-puing lainnya. Juga akan ada tugas kejutan.
Meskipun RoboSimian sekarang menjadi fokus tim Kennedy, Surrogate tidak akan dilupakan.
"Kami akan terus menggunakannya sebagai contoh bagaimana kami dapat mengambil anggota RoboSimian dan mengkonfigurasi ulang mereka ke platform lain," kata Kennedy.
Untuk detail tentang Tantangan Robotika DARPA, kunjungi: http://www.theroboticschallenge.org/