Sebuah tim gabungan insinyur Amerika dan Kanada telah mengambil langkah besar pertama dengan berhasil menerapkan penelitian robotika pertama yang dilakukan di atas Stasiun Luar Angkasa Internasional (ISS) untuk perbaikan dan pengisian bahan bakar satelit ruang angkasa bernilai tinggi yang mengorbit , dan yang berpotensi untuk suatu hari menghasilkan miliaran dolar dalam penghematan biaya untuk pemerintah dan sektor ruang komersial.
Peneliti yang ceria dari kedua negara berteriak "Ya !!!" - setelah berhasil menggunakan percobaan Robotic Refueling Mission (RRM) - melesat keluar ISS- sebagai test bed teknologi untuk menunjukkan bahwa robot yang dikendalikan dari jarak jauh dalam ruang hampa udara dapat menyelesaikan tugas-tugas kerja yang rumit yang membutuhkan kontrol gerakan yang sangat tepat. Eksperimen robotika revolusioner dapat memperpanjang masa operasi satelit yang dapat digunakan yang sudah ada di orbit Bumi yang bahkan tidak pernah dimaksudkan untuk dikerjakan.
"Setelah mendedikasikan waktu profesional dan pribadi selama berbulan-bulan untuk RRM, merupakan dorongan emosional dan kepastian bagi saya untuk melihat aliran video pertama dari alat RRM," kata Justin Cassidy dalam wawancara mendalam eksklusif dengan Space Magazine. Cassidy adalah Manajer Perangkat Keras RRM di NASA Goddard Spaceflight Center di Greenbelt, Maryland.

Dan tim RRM telah memiliki rencana untuk melakukan tindak lanjut yang lebih ambisius pada eksperimen yang dimulai segera setelah musim panas ini, termasuk transfer cairan yang sangat dinanti-nantikan untuk mensimulasikan pengisian bahan bakar satelit aktual yang dapat mengubah bentuk aplikasi robot di ruang angkasa - lihat detail di bawah ini!
Semua operasi robot di stasiun dikendalikan dari jarak jauh oleh pengendali penerbangan dari darat. Tujuan remote control dan robotika adalah untuk membebaskan kru manusia ISS sehingga mereka dapat bekerja pada kegiatan penting lainnya dan melakukan percobaan sains yang membutuhkan pemikiran dan intervensi manusia di tempat.

Selama periode tiga hari dari 7 hingga 9 Maret, para insinyur melakukan operasi bersama antara eksperimen NASA's Robotic Refueling Mission (RRM) dan robot "tukang" Badan Antariksa Kanada (CSA) "tukang" - robot Dextre. Dextre secara resmi dijuluki SPDM atau Manipulator Kecekatan Tujuan Khusus.
Pada hari pertama, operator robot di Bumi secara jarak jauh melakukan manuver "tukang" Dextre sepanjang 12 kaki (3,7 meter) untuk percobaan RRM menggunakan lengan robot yang dibangun stasiun Kanada (SSRMS).
"Tangan" Dextre - yang secara teknis dikenal sebagai "OTCM" - kemudian memahami dan memeriksa tiga alat kerja satelit khusus yang berbeda yang bertempat di dalam unit RRM. Evaluasi mekanis dan elektrik yang komprehensif dari Safety Cap Tool, Wire Cutter dan Blanket Manipulation Tool, dan Multifunction Tool menemukan bahwa ketiga alat itu berfungsi dengan sempurna.

“Tim kami secara mekanis mengaitkan“ tangan ”robot Kanada“ Dextre ”ke RRM Safety Cap Tool (SCT). RRM SCT adalah unit orbit pertama yang menggunakan kemampuan video tangan Dextre OTCM, ”Cassidy menjelaskan.
“Pada awal operasi alat, pengontrol misi secara mekanis menggerakkan umbilical electric OTCM untuk mengawinkannya dengan kotak elektronik integral SCT. Ketika daya diterapkan ke antarmuka itu, tim kami dapat melihatnya di TV layar lebar Goddard - video "cahaya pertama" SCT menunjukkan bidikan alat di dalam gudang penyimpanan RRM (lihat foto).

"Tim kami berteriak" Ya! " untuk memuji sistem checkout fungsional fungsional yang sukses ini. "
Dextre kemudian melakukan berbagai macam tugas yang bertujuan untuk menguji seberapa baik berbagai alat kelengkapan gas, katup, kabel dan segel yang representatif yang terletak di bagian luar modul RRM dapat dimanipulasi. Ini merilis kunci peluncuran keselamatan dan dengan cermat memotong dua kabel kunci satelit yang sangat tipis - terbuat dari baja - dan berukuran hanya 20 ribu inci (0,5 milimeter) dengan diameter.
“Acara pemotongan kawat hanya berlangsung beberapa menit. Namun kedua tugas pemotongan kawat membutuhkan waktu sekitar 6 jam operasi robotik yang terkoordinasi dan aman. Kawat kunci telah dialihkan, diputar dan diikat di tanah pada antarmuka Ambient Cap dan T-Valve sebelum penerbangan, ”kata Cassidy.
Latihan RRM ini merupakan pertama kalinya robot Dextre digunakan untuk proyek penelitian dan pengembangan teknologi pada ISS, sebuah perluasan besar kemampuannya di luar pemeliharaan robot di pos terdepan yang mengorbit besar-besaran.
Keterangan Video: Misi Pengisian Bahan Bakar Robot Dextre: Hari 2. Hari kedua misi Dextre yang paling menuntut diselesaikan dengan sukses pada 8 Maret 2012 ketika tukang robot menyelesaikan tiga tugas yang ditugaskan padanya. Kredit: NASA / CSA

Secara keseluruhan, tiga hari operasi memakan waktu sekitar 43 jam, dan berjalan agak lebih cepat dari yang diharapkan karena mereka mendekati nominal seperti yang bisa diharapkan.
"Hari 1 dan 2 berlangsung sekitar 18 jam," kata Charles Bacon, Insinyur Sistem / Pemimpin Operasi RRM di NASA Goddard, kepada Space Magazine. “Hari 3 berjalan sekitar 7 jam sejak kami menyelesaikan semua tugas lebih awal. Semua tiga hari itu dilakukan selama 18 jam, dengan tim bekerja dalam dua shift. Jadi waktunya seperti yang diharapkan, dan sebenarnya sedikit lebih baik sejak kami selesai lebih awal pada hari terakhir. "

“Selama beberapa bulan terakhir, tim kami telah menyiapkan panggung untuk demonstrasi on-orbit RRM,” kata Cassidy kepada saya. "Sama seperti produksi teater, kami memiliki banyak insinyur di belakang layar yang telah memberikan dukungan pengembangan dan terus menjadi bagian dari operasi RRM on-orbit."
“Pada setiap tahap RRM — mulai dari persiapan, pengiriman, pemasangan, dan sekarang operasi — saya terkejut dengan upaya besar yang telah diberikan oleh banyak tim yang beragam untuk mewujudkan RRM. Kantor Kemampuan Pelayanan Satelit di Pusat Penerbangan Antariksa Goddard NASA bekerja sama dengan Pusat Antariksa Johnson, Pusat Antariksa Kennedy (KSC), Pusat Penerbangan Antariksa Marshall dan pusat kendali Badan Antariksa Kanada di St. Hubert, Quebec untuk menjadikan RRM kenyataan. ”
"Keberhasilan operasi RRM hingga saat ini di Stasiun Luar Angkasa Internasional (ISS) menggunakan Dextre adalah bukti keunggulan banyak organisasi dan mitra NASA," Cassidy menjelaskan.
“Tugas Penghapusan Kelengkapan Gas” tiga hari adalah simulasi awal untuk mempraktikkan teknik-teknik penting untuk memperbaiki robot yang tidak berfungsi secara satelit dan mengisi bahan bakar satelit yang beroperasi secara nominal untuk memperpanjang agar diharapkan memperpanjang umur kinerja mereka selama beberapa tahun.
Teknisi berbasis darat menggunakan fitting dan katup untuk memuat semua cairan, gas, dan bahan bakar penting ke dalam tangki penyimpanan satelit sebelum diluncurkan dan yang kemudian disegel, ditutupi dan biasanya tidak pernah diakses lagi.
"Dampak stasiun ruang angkasa sebagai tempat uji teknologi yang berguna tidak dapat dilebih-lebihkan," kata Frank Cepollina, associate director dari Satellite Captiving Office (SSCO) di Pusat Penerbangan Antariksa Goddard di Greenbelt, Md.
“Teknologi servis satelit baru akan diperlihatkan dalam lingkungan ruang nyata dalam hitungan bulan, bukan tahun. Ini sangat besar. Ini mewakili kemajuan nyata dalam kemajuan teknologi ruang angkasa. "
Empat percobaan RRM yang akan datang secara tentatif ditetapkan untuk tahun ini akan menunjukkan kemampuan robot yang dikendalikan dari jarak jauh untuk menghilangkan penghalang dan mengisi bahan bakar tangki gas satelit di ruang angkasa sehingga menghemat perangkat keras yang mahal sebelum bergabung dengan tempat barang rongsokan orbital.
Waktu operasi RRM di masa depan dapat menjadi tantangan dan tergantung pada ketersediaan Dextre dan lengan SSRMS yang juga banyak dipesan untuk banyak operasi ISS lainnya yang sedang berlangsung seperti perjalanan ruang angkasa, kegiatan pemeliharaan dan eksperimen sains serta berlabuh dan / atau menurunkan muatan mantap aliran kapal pasokan kargo kritis seperti Progress, ATV, HTV, Dragon dan Cygnus.
Fleksibilitas adalah kunci untuk semua operasi ISS. Dan meskipun kru stasiun tidak terlibat dengan RRM, aktivitas mereka mungkin.
"Sementara kru itu sendiri tidak bergantung pada Dextre untuk operasi mereka, operasi Dextre secara tidak langsung dapat mempengaruhi apa yang dapat atau tidak bisa dilakukan kru," kata Bacon kepada saya. "Misalnya, selama operasi RRM kami, kru tidak dapat melakukan aktivitas latihan fisik tertentu karena bagaimana gerakan itu dapat memengaruhi gerakan Dextre."
Berikut adalah daftar operasi RRM yang akan datang - kendala jadwal ISS yang tertunda:
* Pengisian Ulang Bahan Bakar (musim panas 2012) - Setelah Dextre membuka katup bahan bakar yang mirip dengan yang biasa digunakan pada satelit hari ini, itu akan mentransfer etanol cair ke dalamnya melalui selang pengisian bahan bakar robot yang canggih.
* Thermal Blanket Manipulation (TBD 2012) - Dextre akan berlatih memotong pita selimut termal dan melipat balik selimut termal untuk membuka konten di bawahnya.
* Penghapusan Sekrup (Pengikat) (TBD 2012) - Dextre secara robot akan membuka baut satelit (pengencang).
* Penghapusan Cap Listrik (TBD 2012) - Dextre akan menghapus tutup yang biasanya akan menutupi stopkontak listrik satelit.
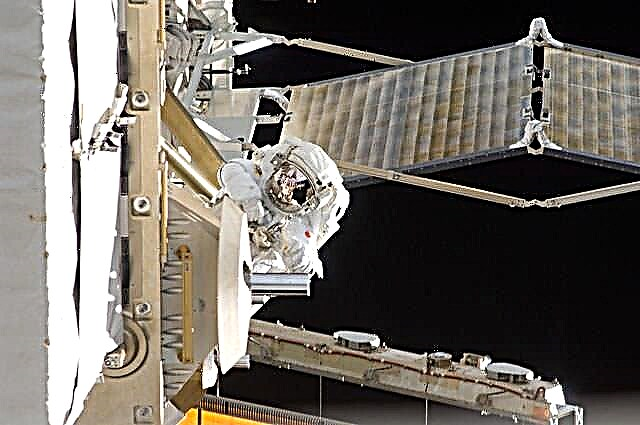
RRM dibawa ke orbit di dalam ruang kargo Space Shuttle Atlantis selama Juli 2011 pada misi ulang-alik akhir (STS-135) dari program ulang-alik NASA selama tiga dekade dan kemudian dipasang pada platform kerja eksternal pada rangka tulang punggung ISS oleh astronot luar angkasa. Proyek ini merupakan upaya bersama antara NASA dan CSA.
“Inilah inti kesuksesan. Dengan RRM, kami benar-benar membuka jalan untuk eksplorasi robot dan layanan satelit di masa depan, ”kata Cassidy.

…….
24 Maret (Sabtu): Kuliah Gratis oleh Ken Kremer di New Jersey Astronomical Association, Voorhees State Park, NJ pukul 830 malam. Topik: Atlantis, Program Antar-Jemput Akhir Amerika, RRM, Orion, SpaceX, CST-100 dan Masa Depan NASA Human & Robotic Spaceflight